一、前言
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变得非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机、交流电机在常规下使用。步进电机必须由脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机并非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家处于一种盲目的仿制阶段,这就给用户在产品选型、使用中造成许多麻烦。鉴于上述情况,我们在此叙述步进电机的基本工作原理,望能对广大用户在选型、使用、及整机改进时有所帮助。
永磁式(PM型)步进电机具有噪音小,出力大,动态性能好的特点;目前使用的数量为HB型的3倍以上,其使用量有逐年增加的趋势;但步距角一般比较大。
永磁式(PM型)步进电机转子为内转子型(外部为定子,中间为气隙的电机),圆柱形转子的外表面分布n、s极(外表面无齿)。 两相PM型爪极步进电机的结构如图2.11所示.定子相绕组是轴向放置,这种相绕组安装方式称为从属型结构。
转子为圆柱形永久磁铁,其中心安装了输出轴。圆柱形永久磁铁的圆周外表面交替分布着n极和s极,极对数为nr,n、s极等极距。其转子磁极通过气隙,对着定子磁极。定子磁极依其形状称为爪极(clawpo1e),用导磁钢板冲压成型,形成nr个爪极。两个定子极板其磁极交互安放,相差1/2极距.共2nr个与转子磁极数2nr相对应,形成一相定子。

定子相绕组绕在圆形骨架上,绕制成环状线圈。定子上的两节定子磁路相同,其相邻磁极相差1/4极距,即偏差90/nr。两转子磁极对应一致。
定子为爪极型的步进电机,气隙为o.2mm, 决定步距角的分辨率θs=90/nr。若nr=5~12,则步距角θs为1.8~7 5,通常使用7.5。 图2.12所示为PM型步进电机的外观。
两相PM型爪极步进电机的工作原理见图2.14。实际的两相PM型爪极步进电机如图2.11所示,设计的多极nr=12,此时定子的爪极数每相有12对极。为简化原理便于理解,图2.14将一相简化成一对极。对比图2.11和图2.14,实际的两相步进电机两相绕组同时激磁,通常作2相激磁驱动,为说明和理解容易,简化为一相激磁状态的说明,一相激磁如能驱动转子旋转,两相激磁肯定也能运转。
如图2.14所示,stl、st2为定子的两相绕组,各线圈如图所示方向绕制。rt为转子,采用钕铁硼磁铁构成,n、s极分布在转子外表面,与定子极之间形成工作气隙。由图知道,一相线圈激磁一对定子磁极,转子极对数与定子极对数的节距相同,相邻转子的s极与n极必定相互吸引,产生电磁力。
第一步,图2.14(a)为l相线圈激磁图,转子与定子stl的磁极互相异性相吸。如果此时施加外力,转子会带着负载移动,电磁力会产生图2.14(a)所示位置的恢复力,负载力的大小决定了位置精度。此时,2相定子st2的磁极中心线在转子磁极n、s极的中间位置,2相定子与转子磁极中心线相差π/2,此位移角为一个步距角。
第二步,图2.14(b)中,stl的线圈电流为off,st2的线圈电流变成on.转子向右移动π/2,转子被st2吸引而停止。
第三步,图2.14(c)中,stl的线圈电流反向通电,定子极性反转,转子再旋转π/2后静止。
第四步,图2 14(d)中,st2的线圈电流反向通电.定子极性反转,转子再旋转π/2后静止。
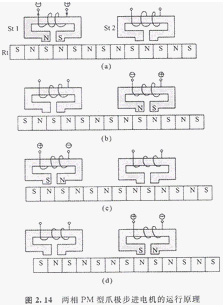
再返回图2.14(a),依次(b)、(c)、(d)反复循环,不断旋转。以上为两相PM型爪极步进电机的运行原理。
根据以上叙述,一个步距角转子磁极极距的l/2,走4步为一个循环。步距角由转子的极数来决定,定子的极数对转矩的增加有影响。当然,此型步进电机有单极(uni-polar)型和双极(b1一polar)型,均伴随定子磁极磁化而旋转,反转亦相同。
三、反应式(VR型)步进电机原理
1、结构:
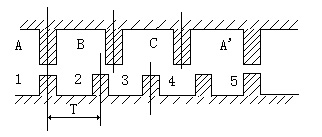
电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A’与齿5相对齐,(A’就是A,齿5就是齿1)下面是定转子的展开图:
2、旋转:
如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て,这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。
不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。
3、力矩:
电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力
F与(dФ/dθ)成正比

其磁通量Ф=Br*S
Br为磁密,S为导磁面积
F与L*D*Br成正比
L为铁芯有效长度,D为转子直径
Br=N·I/R
N·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。
力矩=力*半径
力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态)
因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
四、混合式(HB型)步进电机原理
1两相混合式步进电机的结构
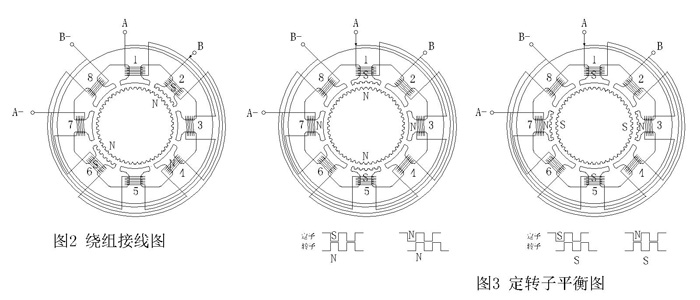
工业控制中采用如图4.1所示的定子磁极上带有小齿,转子齿数很多的结构,其步距角可以做得很小。如图4.1两相混合式步进电动机的结构图,和图4.2步进电机绕组接线图,A、B两相绕组沿径向分相,沿着定子圆周有8个凸出的磁极,1、3、5、7磁极属于A相绕组,2、4、6、8磁极属于B相绕组,定子每个极面上有5个齿,极身上有控制绕组。转子由环形磁钢和两端铁芯组成,环形磁钢在转子中部,轴向充磁,两段铁芯分别装在磁钢的两端,使得转子轴向分为两个磁极。转子铁芯上均匀分布50个齿,两段铁芯上的小齿相互错开半个齿距,定转子的齿距和齿宽相同。
2两相混合式步进电机的工作原理
当两相控制绕组按  的次序轮流通电,每拍只有一相绕组通电,四拍构成一个循环。当控制绕组有电流通过时,便产生磁动势,它与永久磁钢产生的磁动势相互作用,产生电磁转矩,使转子产生步进运动。
当A相绕组通电时,在转子N极端磁极1上的绕组产生的S磁极吸引转子N极,使得磁极1下是齿对齿,磁力线由转子N极指向磁极1的齿面,磁极5下也是齿对齿,磁极3和7是齿对槽,如图4.4所示A相通电转子N极端定转子平衡图。由于两段转子铁芯上的小齿相互错开半个齿距,在转子S极端,磁极1’和5’产生的S极磁场,排斥转子S极,与转子正好是齿对槽,磁极3’和7’齿面产生N极磁场,吸引转子S极,使得齿对齿。A相绕组通电时转子N极端、S极端转子平衡图如图4.3。
因转子上共有50个齿,其齿距角为360°/50=7.2°,定子每个极距所占的齿数为不是整数,因此当定子的A相通电,在转子N极,磁极1的5个齿与转子齿对齿,旁边的B相绕组的磁极2的5个齿和转子齿有1/4齿距的错位,即1.8°,如图4.4所示A相通电时定转子齿展开图画圆圈的地方,A相磁极3的齿和转子就会错位3.6°,实现齿对槽了。磁力线是沿转子N端→A(1)S磁极→导磁环→A(3’)N磁极→转子S端→转子N端,成一闭合曲线。当A相断电B相通电时,磁极2产生N极性,吸合离它最近的S极转子7齿,使得转子沿顺时针方向转动1.8°,实现磁极2和转子齿对齿,B相绕组通电定转子齿展开图如图4.5所示,此时磁极3和转子齿有1/4齿距的错位。依次类推若继续按四拍的顺序通电,转子就按顺时针方向一步一步地转动,每通电一次即每来一个脉冲转子转过1.8°,即称步距角为1.8°,转子转过一圈需360°/1.8°=200个脉冲(见图4.4、4.5)。
在转子S极端也是同样道理,当绕组齿对齿时,其旁边一相磁极错位1.8°。
|

 电话咨询
电话咨询